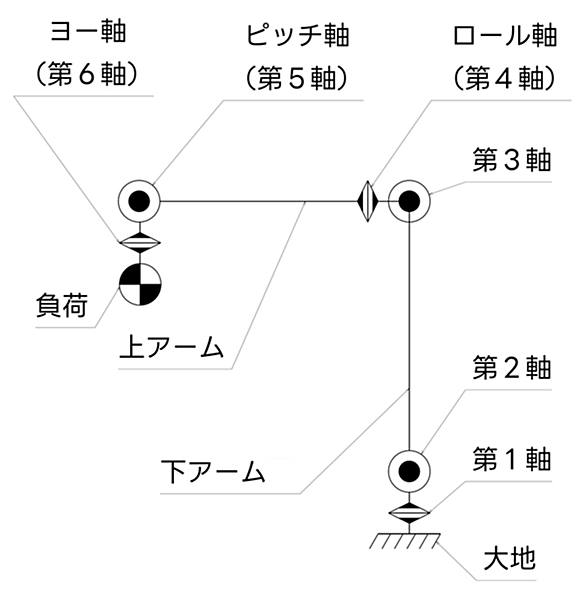
今回は協働ロボット*1の手首構造についてです。 手首の関節について 通常の6軸多関節ロボットは、下記の図のような関節配置をしているものが多いです。 (当ブログのロボット構造の図示方法はこちらをご覧ください:本ブログでのロボット模式図について - FA・ロボット業界の片隅から) したがって、ロボットハンド(ツール)の姿勢ロール・ピッチ・ヨーに対する影響は下記のようになります。 ロール・・第4軸の角度が支配的 ピッチ・・第5軸の角度が支配的 ヨー・・第6軸の角度が支配的 もちろん、上アームの角度によってどの軸がどう影響するかは変わるのですが、基本的にはということでお考え下さい。 安川電機のこの動画…