
Object Tracking
このタグの解説について
この解説文は、すでに終了したサービス「はてなキーワード」内で有志のユーザーが作成・編集した内容に基づいています。その正確性や網羅性をはてなが保証するものではありません。問題のある記述を発見した場合には、お問い合わせフォームよりご連絡ください。関連ブログ

ネットで話題
もっと見る
 tech-blog.optim.co.jp
tech-blog.optim.co.jp17ブックマークReal time Drone object tracking using Python and OpenCV | Terra IncognitaAfter flying this past weekend (together with Gabriel and Leandro) with Gabriel’s drone (which is an handmade APM 2.6 based quadcopter) in our town (Porto Alegre, Brasil), I decided to implement a tracking for objects using OpenCV and Python and check how the results would be using simple and fas... blog.christianperone.com
blog.christianperone.com
blog.christianperone.com
 github.com
github.com13ブックマークopencv.jp - OpenCV: 物体追跡(Object Tracking)サンプルコード -#include <cv.h> #include <highgui.h> #include <math.h> #include <stdio.h> typedef struct parameter Parameter; struct parameter { float alpha; float beta; float gamma; }; int main (int argc, char **argv) { int i, j = 0, c; IplImage *src_img, *dst_img; CvPoint *contour; CvPoint center; int length =... opencv.jp
opencv.jp
opencv.jp engineering.dena.com
engineering.dena.com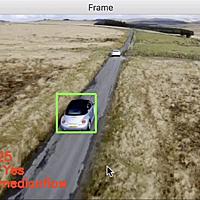
 pyimagesearch.com
pyimagesearch.com5ブックマークTracking Object Allocation in RubyWhenever you do something like MyClass.new, Ruby creates a new object, which uses a little bit of memory. But that's not the only way you are creating objects. Many actions will create objects, including strings and arrays. Even if you don't say String.new or Array.new, it's still a new object th... www.cloudbees.com
www.cloudbees.com
www.cloudbees.com














