NT京都にむけてマリオネット風のロボットコントローラを製作。左右に3軸加速度センサとジョイスティックが1個ずつ。マイコンはGR-KURUMI。Bluetooth(SPP)でロボットにコマンドを送る。ほんとうは左右のコントローラも無線でつなぎたかったのけど、今回は時間の関係でケーブル接続。

使用した主なコンポーネント
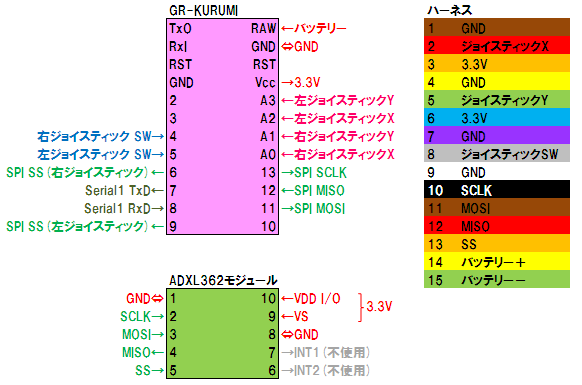
- GR-KURUMI : Arduino Pro Mini互換マイコンボード
- BlueMaster : Bluetoothモジュール(シリアル接続)
- ADXL362モジュール : 3軸加速度センサモジュール(SPI接続)
- サム・ジョイスティック : プレステのジョイスティック部品。ボリューム×2, スイッチ×1
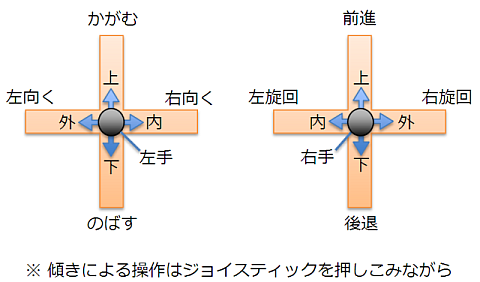
これで茶運び人形ロボを操縦する。操作方法はこんなかんじ↓
GR-KURUMI、加速度センサモジュール、およびハーネスのピン配置は下記の通り。