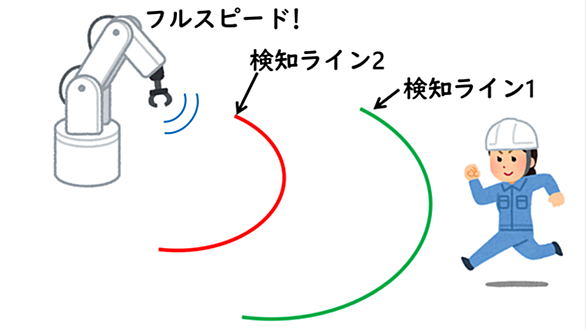
本記事は、下記の記事の訂正版となります。 協働ロボットの「速度及び間隔の監視」について - FA・ロボット業界の片隅から 旧記事は間違いの箇所について注記を追加した上で残しています。 誤情報を掲載していたことについて、お詫びいたします。いまいち考え方がピンとこない「速度と間隔の監視」について説明してきます。*1*2 基本的な考え 「安全な間隔」の計算方法 項C, Zd, Zr 項Sh, Sr, Ss 項Sh, Sr, Ssの注意点 図解 現実的な実現例 項Sh, Sr, Ssを定数扱いする 実現が容易な例1 実現が容易な例2 まとめ 基本的な考え まず大前提として、 「動いているロボット*3と…