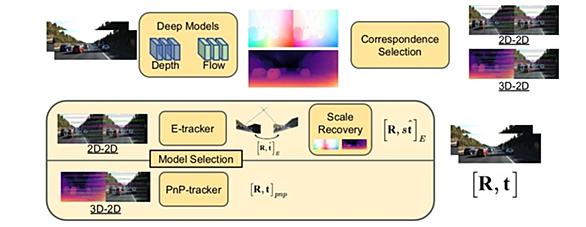
DF-VO: What Should Be Learnt for Visual Odometry? Mar1 2021 Under review By Huangying Zhang et al. Deep learning ベースのVO手法はgeometricalな情報を使わないので、従来の手法より劣る DLベースの深度推定と、optical flowによる幾何的なトラッキングを組み合わせた手法DF-VOを提案 DLベースの深度推定によってscale drift問題が解決する CNN-SLAMCNN-SLAM(Tateno et al. 2017)などとの違いは、深度情報をトラッキングする点…


 blog.negativemind.com
blog.negativemind.com
 www.youtube.com
www.youtube.com
 www.slideshare.net
www.slideshare.net
 blog.negativemind.com
blog.negativemind.com
 github.com
github.com