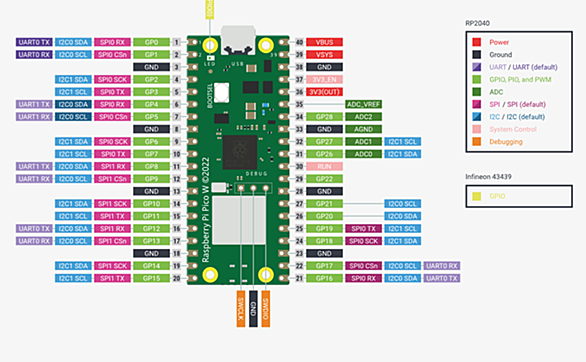
【目次】 1.はじめに 2.各処理の記述 2.1 GPIO 2.2 パルス幅変調(PWM) 2.3 A/Dコンバーター 2.4 タイマ割り込み 2.5 処理の時間計測 1.はじめに ラズベリーパイPicoというマイコンがあります(以下Picoと表記します)。倒立振子を作り上げたくてPico-SDK(Pico用のC/C++にて開発するための環境)に手を出してきました。いくつか機能別にコードの書き方をまとめておきたいと思います。(自分用の備忘録) GPIO PWM A/Dコンバーター タイマ割り込み 処理の時間計測 参考: 製品としてのPicoに関する情報がいっぱい載ってます。 Raspberry…


 mickey-happygolucky.hatenablog.com
mickey-happygolucky.hatenablog.com
 github.com
github.com