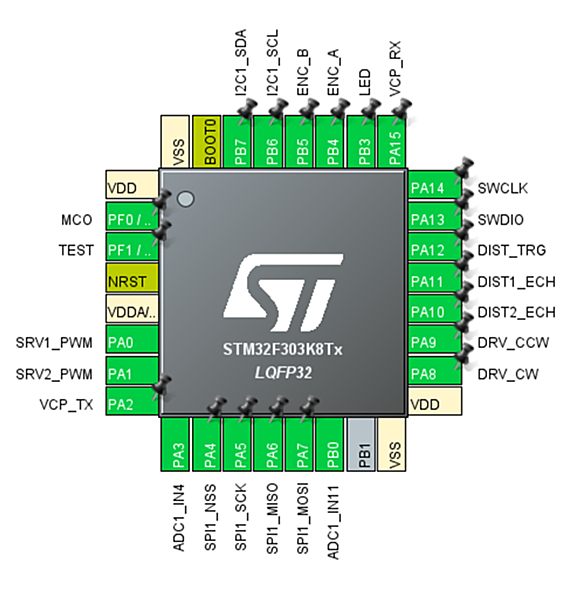
モーター制御基板をラズパイPicoからSTM32F303K8へ変更 理由 1.高速通信制御可能なスレーブデバイスにしたい 2.100LPR程度のエンコーダーを使えるようにしたい 3.そもそも処理能力がカツカツになった STM32F303K8へ変更後 ■通信 >SPI通信10MHzのスレーブデバイス >DMA転送で通信処理負荷低減 >設定値等の通信は、レジスタマップとして複数同時処理できるようにした ■エンコーダー >ペリフェラルのエンコーダを使用 ■RTOS >オーバーヘッドのデメリットの方が多く、 STM32F303K8ではメモリがギリギリになりそうなので不採用とした。 ■構成 以下の通り、…