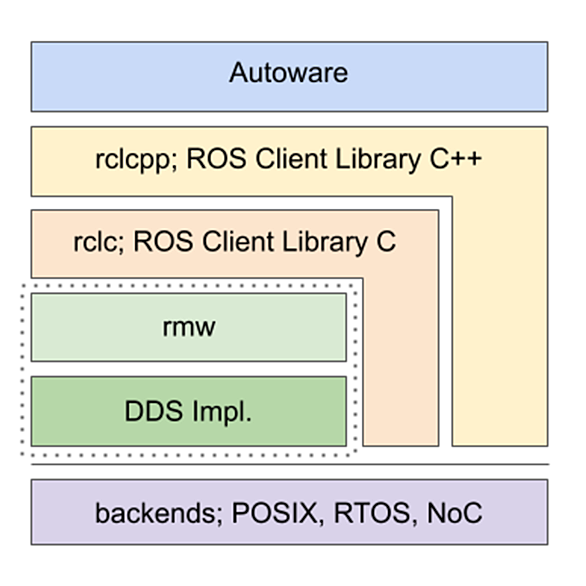
こんにちは、ティアフォーエンジニアの村上です。今回は、ROS 2の通信機能に関するお話をしたいと思います。 自動運転OSSの「Autoware」は、ROS 2の上に構築されており*1、ROS 2はその通信 (出版/購読) backendとしてDDS (Data Distribution Service) を採用しています。多くのプロセスからなるAutowareにおいて、通信は注目すべき要素です。安心・安全な自動運転の実現のためには、Autowareの機能自体はもちろんのこと、通信のようなbackendについて、各systemに対するtuningをすることは不可欠です。 今回はそのROS 2/D…