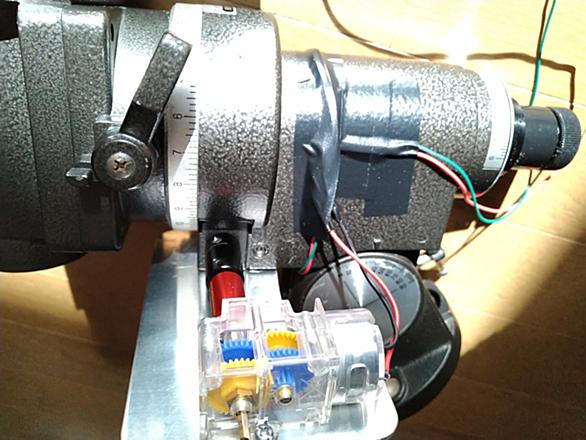
何十年ぶり・・・?かの 正規の新品130モータ EV講習とかででCモータのブラシの作用を電子回路で 置き換えたのがインバータ、ブラシレスモータです。。。ってな感じで よく話してるけど・・・ 実際にそれをやったそのものを見せたことはないことに気が付いた。 130モータを3相DCブラシレスモータで回す・・・を作ることにした。 大学生にインバータ製作講座をやってって話が仕事で入った。 学生フォーミュラではうちのEVシステムを提供してて 大会の時はメーカ-ブースで いろいろ技術紹介して評判がよかった・・・そうな。 でもって、せっかくならちょっと 普通の?インバータ技術講習とかでやってることとは 違うこ…





 kaden.watch.impress.co.jp
kaden.watch.impress.co.jp
 kousaku-kousaku.blogspot.com
kousaku-kousaku.blogspot.com
 kakakumag.com
kakakumag.com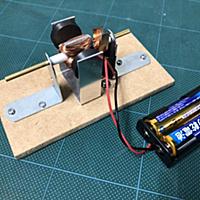
 togetter.com
togetter.com
 matomeno.in
matomeno.in
 www.mayoinu.com
www.mayoinu.com
 enechange.jp
enechange.jp
 keiken-blog.blogspot.com
keiken-blog.blogspot.com
 gitaroom.blogspot.com
gitaroom.blogspot.com