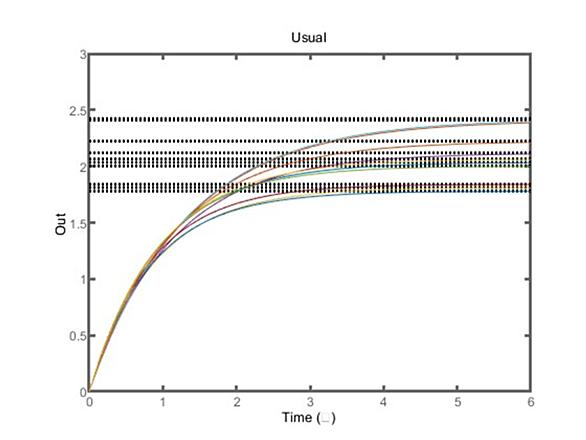
ここでは、モデル誤差抑制補償器(Model Error Compensator, MEC)の効果を確認するための数値例として2次システムのシミュレーション結果を示します。 モデル誤差抑制補償器についての説明は以下の記事をご覧下さい。 blog.control-theory.com 制御対象と問題設定 ここでは、制御対象として次の対象を扱います。 ここで、本記事ではとし、の取りうる範囲はとします。 誤差がない場合 まず、誤差がない場合についてフィードバック比例フィードバック制御器を施した結果を示します。まず、ブロック線図が以下のようになります。 フィードバック制御系のブロック線図 次に制御結果(…






 jus-diet.hatenablog.com
jus-diet.hatenablog.com
 www.50kgdiet.com
www.50kgdiet.com
 nami621.hatenablog.com
nami621.hatenablog.com
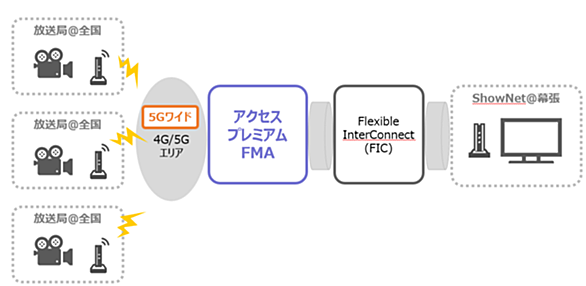
 internet.watch.impress.co.jp
internet.watch.impress.co.jp jus-diet.hatenablog.com
jus-diet.hatenablog.com
 nami621.hatenablog.com
nami621.hatenablog.com
 tyuunennkiktou.com
tyuunennkiktou.com
 www.omg-ox.org
www.omg-ox.org
 www.ttcbn.net
www.ttcbn.net