制御工学
(サイエンス)
【せいぎょこうがく】
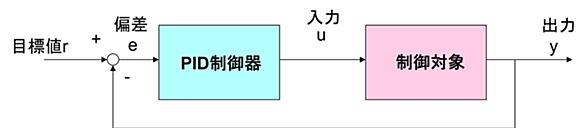
工学系の一分野で、入力および出力を持つシステムにおいて、その状態変数ないし出力を自由に制御する方法全般にかかわる学問分野を指す。主にフィードバック制御を対象にした工学分野の学問である。応用分野は機械系、電気系、化学プロセスが中心であるが、ものを操ることに関する問題が含まれれば制御工学の対象となるため、広範な分野と関連がある。
工学系の一分野で、入力および出力を持つシステムにおいて、その状態変数ないし出力を自由に制御する方法全般にかかわる学問分野を指す。主にフィードバック制御を対象にした工学分野の学問である。応用分野は機械系、電気系、化学プロセスが中心であるが、ものを操ることに関する問題が含まれれば制御工学の対象となるため、広範な分野と関連がある。
 taketake2.com
taketake2.com
 controlabo.com
controlabo.com
 blog.control-theory.com
blog.control-theory.com
 blog.control-theory.com
blog.control-theory.com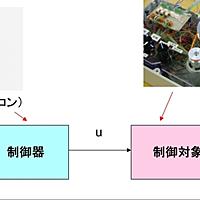
 blog.control-theory.com
blog.control-theory.com
 blog.control-theory.com
blog.control-theory.com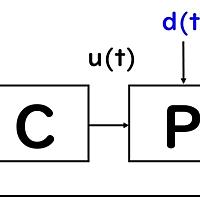
 blog.control-theory.com
blog.control-theory.com
 qiita.com
qiita.com www.jstage.jst.go.jp
www.jstage.jst.go.jp