フィードバック制御の一種。入力値の制御を出力値と目標値との偏差、その積分、および微分の3つの要素によって行う方法のことである。
今年も無事、メイカフェア東京の出展 承認 もらえた♪ もうだいぶ前から審査を通過できないかも・・・とか 考えることもなくなって 春からさて、今年は何を出そう・・・って考えてる。。。 ^^; 今年はこちらの大型車輪のスティック君はメンバーに入れて 連れて行こうかなと思ってる #メイカフェア東京 出展OK 来た♪大型車輪で制御を簡単にした#倒立振子 ロボ スティックくんを連れていこう。・曲がる時にはウインク♪・バランス崩れると口がへの字になります他にもマイクロロボ達、準備中難易度の高い小型車輪版も連れて行きます♪ https://t.co/3wh3fimhcV… #M5Stack pic.twit…
Processingってソフト、ご存じでしょうか。 時々使います。無料ソフトです。 グラフィックものが割と簡単にできるって評判だった。。。かな? 検索するといっぱい情報出てきます。 JavaベースですがC言語風なのでおよそC言語の知識があれば使うのは難しくないと思います。 Processingは、プログラミング初心者からアート・デザイン・科学分野まで幅広く使われるソフトウェアです。簡単に言うと、**「コードを書くだけで、簡単にグラフィックやアニメーションを作れる環境」**ですね。 検索して出てきたものです・・・ 💡 Processingって何? 「コードを書く→即座にビジュアル化」できる環境 …
それなりにリアルタイム制御精度上げようとしするなら もうちょっとちゃんと?考えないといかん。。。 M5SticKC_Plus2の倒立振子ロボ、バッテリ駆動では約3.7Vでは サーボでの車輪回転速度遅い。 毎秒1.5回転が最速くらい。 遅いのに、倒れる速さはスティックくん速いので倒れ始めのわずかな遅れが 命取り。。。です。 ここ数日いろいろいじってて 5V出力電源をサーボ電源に使った時よりかなり難易度のハードルが上がった感。 重心点垂直角度から±2度くらいしか許されない感じ。 ずっと以前、タイヤ径が5cmほどで10回転毎秒程度回り、身長が20cmほどある 倒立振子ロボだと応答なんか気にする必要な…
連続回転型サーボの特性、ちょっと丁寧に調べようってことにしたのだけれど M5SticKC_Plus2はやっぱし、、、画面が小さくてI/Oも少なくて不便なので M5Stackでサーボテストベンチを作っていくことにした。 とりあえず、FS90RとSG90-HVに同じパルスを入れて動かしてみた 黄色い新型 #M5SticKC_Plus2 での#倒立振子 ロボ製作中...#M5Stack #スタックチャン...の方が 画面大きくていろいろできるので こちらでサーボ調査ロボ? 作るとしよう♪赤い旧型での倒立振子ロボはこちら↓ https://t.co/97LJVoJwQy#FS90R #SG90HV #…
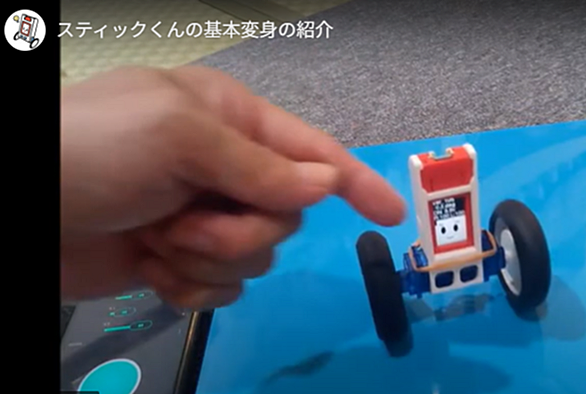
スタックチャン型のスティックくん 製作中 倒立振子ロボ スティックくん紹介して、 興味がある方は作ってみてください...って言っても、 以前の赤色のM5SticKC_Plusはもう販売されてない...らしい。なので作るなら、 新型の黄色のM5SticKC_Plus2でということになります。 でもっていろいろ紹介することが増えそうなのでこれを機会に以前より 丁寧に?製作手順とかもメモっていこうと思います。 黄色の新型M5SticKC_Plus2#倒立振子 ロボ 製作中 #スタックチャン 型の #スティックくん #PID制御 ゲイン調整用の スマホ用解析ツール作ってみた。 P項ゲインだけでの動作確…
最近、時々問い合わせも頂くようになって・・・ でもちょっと誤解されてるとこもあるので。 今まで何度も細切れに紹介してたけど、 電子工作でやってみようかな・・・って人向けに紹介です。 倒立振子ロボ スティックくん、 もう初号機から5年ほど経ちます。 M5SticKC_Plusが出て、これはイケてる!って始めた。 スティックくんのアイコンは娘が作ってくれたモノ♪ 超簡単♪ 倒立振子ロボ スティックくん倒立振子Hatです。工具不要、スナップフィット 20秒で組立て♪連続回転サーボを繋いだだけ・・・ですが、ギヤモータ&ドライバより応答遅いので制御は工夫してます#M5stack #M5StickC #P…
先の手回しインバータでベクトル制御紹介の執筆、 そこそこ評判がよかった?ようで、 今度は倒立振子ロボスティックくんをちょっと専門誌で紹介することになって・・・ 作り方なども紹介することになったけど、、、 もう赤い、、、今まで使ってきたM5StickC_Plusはもう販売されてなくて 黄色の M5StickC_Plus2 に変わってる。 なので M5StickC_Plus2 で作り方とか紹介せんといかんかな・・・と思って 買ってみた。 黄色のM5Stick買った♪#M5StickC_Plus2 です これで黄色の #倒立振子 ロボ #スティックくん、#スタックチャン 作ってみます ”2”になって…
見た目はオリジナルのスティックくんより、 スタックチャンにした方がウケる...感があるのでスタックチャンを内蔵?した 倒立振子でおさらい中。 #スタックチャン 内蔵 #倒立振子 ロボです♪#RemotXY での操縦型に変更...エンコーダなど、 外付け回路なし応答の遅いサーボ繋いだだけの簡単構造の倒立振子な分、制御はちょいと高度かな ^^; #M5Stack #PID制御 #カルマンフィルタ #駆動力FB位置推定 #相補フィルタ #BLE #バックラッシュ補正 pic.twitter.com/p5gOhjGHM7 — しん (@shinichi_nin) 2025年3月19日 スティックくんで…
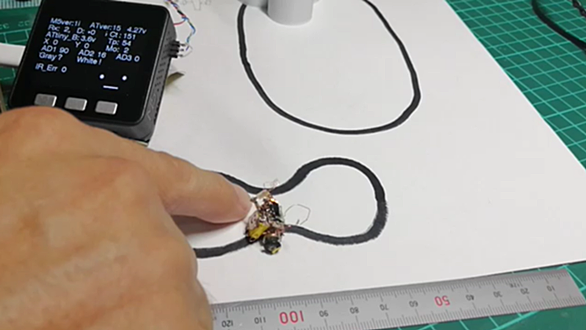
先回までの単純なバンバン制御から比例制御(P制御)にバージョンアップ♪ 指乗り #マイクロロボ 今度は・・・ #ライントレース 制御調整中! 自称... #世界最小 ^^; ♪ 先回のバンバン制御から 制御改良して 比例制御を 入れ、応答性上げました でも、まだ0.1秒周期制御#M5Stack #スタックチャン #Arduino #BLE #ATtiny #赤外線シリアル通信 pic.twitter.com/5l0dZ79bss — しん (@shinichi_nin) 2024年6月4日 バンバン制御では最高速の3%でライントレース動作が精いっぱいでしたが 比例制御の導入・・・・ちょいと大げ…
この記事ではモデル誤差抑制補償器(Model Error Compensator, MEC)についてまとめます。モデル誤差抑制補償器に関する動画・関連記事・関連論文・MATLABリンクは最下部に置いています。モデル誤差抑制補償器は,制御系のロバスト性を高める方法です。既存の制御系のロバスト性を高めたり,ノミナルの制御手法と併用してロバスト性を向上したりする目的で使用できます。本記事は以下の総合論文をベースにしてモデル誤差抑制補償器を紹介したものです。式展開や理論の詳細は原稿や最下部の関連論文をご覧ください。 執筆者:制御工学の研究を20年行っている国立大学教員 >>(総合論文,計測と制御PDF…




 skill-hacks.co.jp
skill-hacks.co.jp www.picfun.com
www.picfun.com
 ja.wikipedia.org
ja.wikipedia.org
 gigazine.net
gigazine.net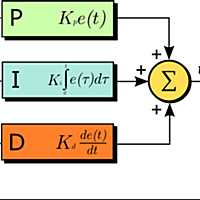
 s0sem0y.hatenablog.com
s0sem0y.hatenablog.com
 www.nicovideo.jp
www.nicovideo.jp
 tech-blog.cerevo.com
tech-blog.cerevo.com
 www.yukisako.xyz
www.yukisako.xyz
 monoist.itmedia.co.jp
monoist.itmedia.co.jp