倒立振子
(サイエンス)
【とうりつしんし】
振り子を逆立ちさせたもの。振り子は逆立ちさせると不安定になる。そこで逆立ち状態を安定に保つには、振り子が倒れようとするのを検出して倒れないように振り子の支点を移動させればよい。これは手のひらの上に棒を立てる遊びと同じ制御である。
倒立振子はフィードバック制御の最も基本的な実験のひとつである。単に逆立ちさせるだけではなく、逆立ちさせたまま自由に移動させたり、下垂状態から起こすなど各種の制御がある。
なお、読みは「とうりつしんし」である。「とうりつふりこ」ではないので注意。

 qiita.com
qiita.com enakai00.hatenablog.com
enakai00.hatenablog.com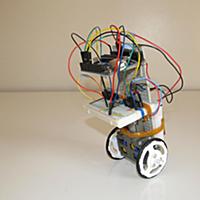
 www.instructables.com
www.instructables.com
 ichiro-maruta.blogspot.com
ichiro-maruta.blogspot.com
 qiita.com
qiita.com
 homemadegarbage.com
homemadegarbage.com