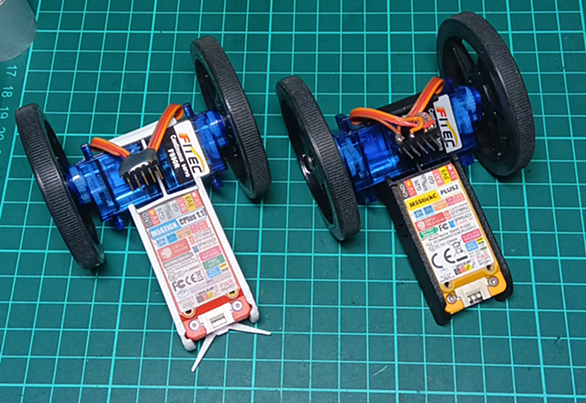
Interface 9月号 シンプル倒立振子ロボで理解するPID制御 サンプルスケッチはM5StickC_plus用でした。 plus2はこの前紹介したみたいに電源落ちやすいので サーボ駆動電源は5V出力 じゃなくてBAT出力使ってる。 5Vうまく使えんかなと ちょっとわかりにくかった・・・ スティックくんの裏側 左:M5SticKC_Plus 5V使うようにしてる サーボピン5本 GNDからG0までのピンヘッダー 右:M5SticKC_Plus2 BAT使うようにしてる サーボピン6本 GNDからBATまでのピンヘッダー M5SticKC_Plus2 の方は 特に配線の取り回しはイケてない例…






 language-and-engineering.hatenablog.jp
language-and-engineering.hatenablog.jp www.ne.jp
www.ne.jp
 qiita.com
qiita.com forest.watch.impress.co.jp
forest.watch.impress.co.jp
 togetter.com
togetter.com
 github.com
github.com
 memorva.jp
memorva.jp www.ponko2.com
www.ponko2.com www.chokaigi.com
www.chokaigi.com